



新闻媒体
东莞市求精轴承有限公司(总部)
电 话:0769-22786416
0769- 23668162
传真:0769-22786419
手机:13669867858
邮箱:xgzhch@163.com
公司地址:广东省东莞市万江区牌楼基工业区 岳潭坊东一横巷5号
电 话:0769-22786416
0769- 23668162
传真:0769-22786419
手机:13669867858
邮箱:xgzhch@163.com
公司地址:广东省东莞市万江区牌楼基工业区 岳潭坊东一横巷5号
宁波市多辉轴承有限公司(分公司)
电 话:0574-86556187
电话:13713067019
传真:0769-22786419
网址:www.qjbearings.com
地址:浙江省宁波市镇海区贵驷街道贵安路24号
电 话:0574-86556187
电话:13713067019
传真:0769-22786419
网址:www.qjbearings.com
地址:浙江省宁波市镇海区贵驷街道贵安路24号
 新闻媒体>>轴承知识
新闻媒体>>轴承知识
港口机械减速装置失效机理及安全应用
2019-12-18胡吉全
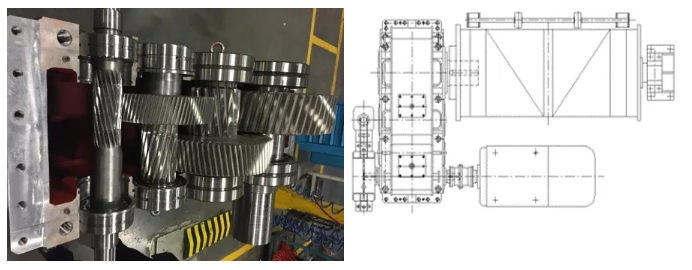
01 港机减速装置的失效形式减速装置是港口机械Z常用的传动部件,在目前技术状况下,所有的工作机构均需通过减速装置以实现运动速度和扭矩的正常传递。根据机构工作要求不同,港口机械常采用卧式平行轴、立式行星和“三合一”传动等减速装置。

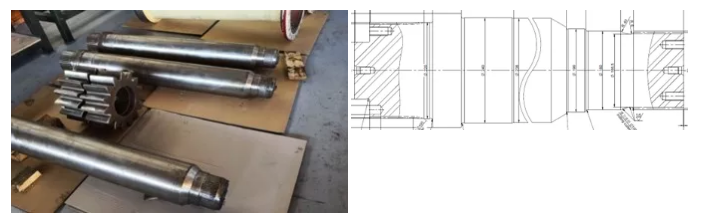
传动轴变形
主要发生在减速装置的高速轴。特别是变频调速的传动系统,经常采用电机超频特性以提高工作速度,在基频或低频状态下,减速装置传动轴运转正常,当电机超频输入高速度时,容易造成高速传动轴变形而出现径向摆动,甚至与透盖擦碰打火等失效形式,该现象且不受满载或空载的影响。
港机减速装置断轴已成为Z为常见的失效形式,对于小惯量机构,如:起升机构等,断轴主要出现在高速级;对于大惯量机构,如:门座起重机的回转机构、大车运行机构等,断轴主要出现在低速级。
港机减速装置齿轮粘合和断齿也是比较典型的失效形式。
齿轮粘合比较多出现在减速装置承受单向齿轮啮合力的场合,像具有位能性载荷的起升机构。
断齿主要有疲劳断齿和冲击断齿,疲劳断齿可能发生在任何一级传动齿轮,冲击断齿主要发生在低速级。

港机减速装置轴承失效主要表现为滚动体与滚道胶合,保持架碎烂,其中高速级容易出现过热和保持架碎烂,低速级容易出现润滑不良至滚道胶合。

1.港口机械的特征
要分析港口机械减速装置的失效机理,应先了解港口机械与其他起重机械相比所具有的特征。
工作特征
1)重复短时循环作业
工作过程中机电设备循环性的启动、制动,正反方向运行;
2)快速高效作业
单位时间工作循环次数多,作业时间长;
3)多机构联合作业
每一次作业任务的完成需要多个机构协同工作。
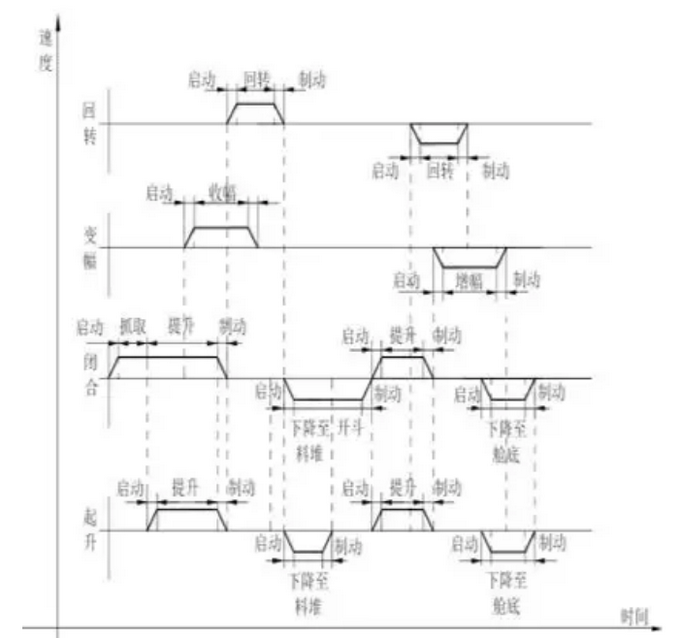
抓斗门机作业循环如下图:
1)承受相对复杂的动载荷
由于港口机械重复短时循环,频繁的正反方向启、制动,传动系统不断的加速、减速运动变换,造成由惯性载荷派生出的动载荷、冲击载荷特性尤其突出,且动载荷的变化幅度大,作用频繁。
2)承受大小变化的位能性载荷
港口机械的起升机构是典型的位能性载荷,其作业方式、作用频次和载荷大小还具有很大的不确定性和可变性。
3)承受反复作用的循环载荷
循环载荷作用是港机的一个典型受力特征,重复短时反复作用,载荷历程呈周期性,具有疲劳载荷的典型特性。
惯性特征
港口机械工作机构之间具有很大的惯性差异,且在工作过程中均频繁的起制动,频繁加、减速运行,造成其惯性载荷比较突出,且随机作用,随机变化。
2.起升减速装置失效分析
起升机构是起重机工作级别Z高的机构,承受位能性载荷,工作速度变化范围大,小惯量机构,减速装置的失效主要为高速轴变形和断裂,轮齿疲劳失效等。
高速轴变形和断裂原因
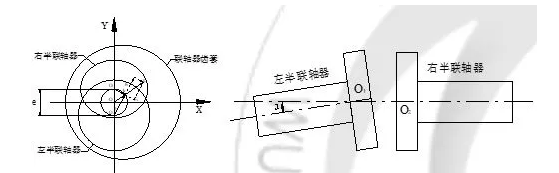
1)联轴器不对中
附加径向力:
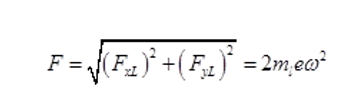
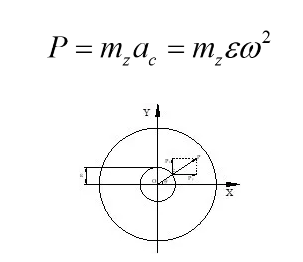
附加离心力:
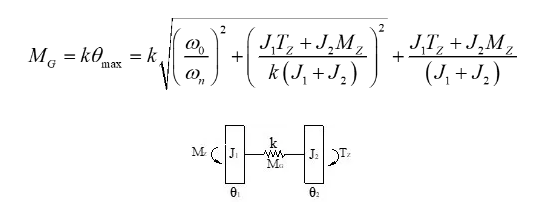
附加惯性力矩:
齿轮疲劳失效原因
1)抓斗工况开闭机超载
抓斗作业工况下,开闭绳载荷不均匀系数有两种选取方法,按老的教科书推荐取值为0.66,按《起重机设计规范-2008》推荐,在变频调速控制下,当抓斗闭合时可检测控制支持绳和开闭绳载荷均衡,系数可取值为0.55。但是在绝大多数情况下,抓斗闭合时支持绳和开闭绳载荷并不能有效控制在均衡状态,从而造成抓斗开闭机传动系统过载,致使减速装置早期疲劳失效。
2)减速装置使用系数的取值
减速装置使用系数是将包括工作级别、动载荷、冲击、机构惯量、载荷性质、工作环境等影响因素进行综合考虑而取的一个安全系数,但实际上选型者对各个因素的认识差异,很难准确把握各个因素的影响程度,从而造成使用系数取值过大或过小,影响减速装置使用寿命。
3.回转减速装置失效分析
回转机构是港口臂架起重机中的重要工作机构,承受双向回转载荷作用,大速比、大惯量。减速装置多采用立式行星传动,其失效主要为高速轴断裂,行星架损坏,低速轴断裂,小齿轮断齿等。在起重机所有的工作机构中,回转传动的故障出现Z多。
断轴失效分析
1)高速轴断轴原因
行星传动高速级断轴主要是电机过载力矩所引起。在采用绕线电机驱动,切电阻调速的情况下,当机构启动加速时间过短,电机短时过载力矩很大,极限力矩联轴器失效时,可能造成输入轴断裂。另外传动系中联轴器不对中也会增加断轴影响。
2)低速轴断轴原因
行星传动低速级断轴主要是由系统惯性力和冲击载荷所引起,与电机正向传动没有关系。极限力矩联轴器在反向传动中对系统没有任何保护作用,一方面是由于惯性、冲击载荷作用时间短,可以迅速在系统低速级产生破坏;另外由于系统具有弹性,速比又较大,所以惯性、冲击载荷还来不及传到联轴器,低速级的某些部件可能早已经损坏了。
齿轮及行星架失效分析
1)输出轴小齿轮断齿原因
行星传动输出小齿轮与大齿圈啮合的齿侧间隙过大或过小时,会造成回转冲击或齿轮咬合,特别是正反向反复作用时从而造成小齿轮断齿失效,外载荷来源主要是惯性力。
2)传动齿轮及行星架失效原因
行星传动有中心齿轮、行星齿轮和行星架。港机使用的行星减速装置中心齿轮、行星齿轮和行星架的失效基本与低速轴的失效同行,受反向传动载荷影响比较大。相对于中心齿轮,行星齿轮和行星架更弱一些,总是Z先损坏。
关于极限力矩联轴器的保护作用
极限力矩联轴器是为了保护回转传动系统在事故性超载状态下不发生破坏,通常安装在传统动系统的高速端,计算极限摩擦力矩为1.1Mmax(电机Z大驱动力矩)。从港口起重机的实际使用情况看,极限力矩联轴器只能对电机正向输入力矩起到限制作用,从而保护减速传动装置的高速级。对于造成减速传动装置主要失效的的制动惯性力,冲击力,事实上起不到保护作用,因此,可以考虑对于变频调速的驱动系统取消回转极限力矩限制器(变频电机的输出力矩可由变频器控制)。
4.“三合一”传动装置失效分析
三合一传动大量使用在港口机械的运行机构中,通过多台套进行分别驱动,也经常出现断轴失效。
由于运行不同步造成的断轴
港机大车运行不同步总是存在的,如果传动装置的载荷长期处于分配不均匀状态,容易造成驱动单元损坏,特别是大跨度的轨道龙门吊。
由于安装方式不正确造成的断轴
对于具有回转惯性冲击载荷的门座起重机,“三合一”传动的大车驱动单元若采取底座式安装,由于不能吸收回转振动和冲击,补偿沿轨道方向的运动,将会造成减速装置漏油、断轴等损坏。所以大车“三合一”传动必须采用浮动安装,并具有吸收振动冲击的措施。
03 港机减速装置的选型与安全应用
1、减速装置的选型
选型方法
减速装置的选型参数:高速轴输入转速、输入功率和传动比;
验算参数:输出轴的径向力。
通常是根据输入转速、传动比选取许用输入功率,再考虑一个使用系数使其大于计算功率。
使用系数的取值
1)通用设计取值原则
使用系数是减速装置选型中可变性比较大的参数,它包含三个影响因素,即工作时间、起制动频数和惯性增加系数(所有外部转动惯量与电机转动惯量之比),将各自的影响按权重大小取值获得Z终的使用系数值。这些都是从通用设计原则来考利的,对任何机械都适用。
2)针对港口机械的适用性取值
减速传动装置没有港机专用的设备,针对港口机械的构造、作业和受力特征,应考量其实用性取值。除遵循通用设计取值原则外,还应该考虑:使用环境(温度条件)、载荷状态(散货抓斗、集装箱、件杂货作业)、载荷性质(位能性、平移性)、运行方向(单向、双向),充分了解和准确把握对象机型的使用工况条件和特点,做到尽可能合理选择。如门座起重机,起升、回转机构的使用系数要取到1.5~2左右,变幅在1.2~1.4、大车运行1.1~1.3之间。
减速器各级传动应该是按等强度原理设计,但实际考利到系列成组有一个覆盖原则,从而造成减速箱不同级的强度富余量的差异,故在相同的使用条件下,有些传动部件出现提前失效情况,选型时应考虑到。
2、减速传动装置的安全使用
减速传动装置作为港口起重机的Z基础部件,其状态对整机的正常工作和安全都会带来直接的影响,从目前发生失效的案列看,除了设计选型等方面的问题外,安全使用也是一个很重要的方面。
(1)起重负荷的检测与控制
超负荷限制器是检测和控制起重机工作载荷的保护装置,应该保持要求的精度和正确的检测方法。抓斗起重机起升绳和开闭绳的负荷应独立检测和分别统计,严格控制开闭绳的超负荷。超负荷限制器也要正确判断动载峰值和工作超载荷,做到合理避峰和限制超载荷。
(2)传动速度的检测与控制
减速装置输入、输出速度的稳定和正确,是影响传动系统及减速装置工作安全的重要因素。对减速装置输入、输出速度应进行有效实时监测和控制,对4级变频电机超频的调速范围应严格控制,如超过2000r/min必须采取包括动平衡试验等相应措施。位能性工作机构超速是Z危险的事故,应严格控制和避免。对系统输出速度的检测应独立于输入端的检测,并进行各自独立的控制。
(3)动载荷峰值的检测与控制
动载荷峰值主要出现在工作机构的启动和制动阶段,对于大惯量机构动载荷的峰值应该采取控制措施。
如港口门座起重机的回转机构,有变频调速,有切电阻调速控制方式。启动时可通过控制启动加速时间和电机的输出扭矩有效削减动载荷峰值,但制动时主要是通过制动装置消耗系统的能量,制动时间由司机控制所以难免会出现动载峰值过大造成传动部件受损。所以对门机回转机构应尽量采用变频调速控制,变频变力制动。
若在进行制动操作时能检测系统的运行速度,结合系统质量,在设定的制动时间范围内给以合适的制动操作力,从而实现智能制动,将会有效的防止系统过载,保护传动装置免受损坏。
(来源:中港技术)

